
Eigen ervaring
Ik ben opgevoed door iemand in een rolstoel. Ik heb vaak genoeg meegemaakt hoe vervelend en beperkend de wereld is voor iemand wiens plannen door één drempel kunnen worden doorkruist.
Een drempel is fysiek én mentaal een belemmering — zeker als je ergens snel naartoe of weg wilt. Een dagje winkelen, een weekendje weg of spontaan ergens binnenwippen is voor veel mensen op wielen geen vanzelfsprekendheid. DrempelVrees brengt daar verandering in: door data-architectuur, scanning, modeltraining en ouderwets handwerk te combineren tot iets dat blijft werken. En daar hebben we uw hulp bij nodig.
We zijn begonnen op één plek: de winkelas Wycker Brugstraat → Vrijthof. Drie dagen meten, 171 winkelingangen vastgelegd. Het beeld is niet gunstig.
Slechts 42% van de winkels langs deze as is zonder hulp of hulpmiddelen toegankelijk voor mensen in een rolstoel.
De overige 58% heeft een drempel, een trede of een trap bij de ingang. Bij 28% gaat het om een traptrede hoger dan 8 cm — zelfstandig onpasseerbaar.
Gemeenten weten welke straten ze onderhouden, maar niet welke drempels, paaltjes en hellingen daarop liggen. Routeplanners voor rolstoelen en scootmobielen werken met schattingen, vrijwilligersmeldingen of helemaal niets.
Je kunt Google vragen naar het type winkel en de weg ernaartoe, maar niet of je met de rolstoel of buggy wel binnenkomt, of onderweg trapjes tegenkomt.
Want dit project gaat over mensen. Over de vrouw die haar moeder ophaalt voor een dagje stad. Over de man op de scootmobiel die niet weet of de route die hij plant ook eindigt waar hij wil eindigen. Over wie 's avonds bij voorkeur lantaarnpalen ziet branden.
Ik ben opgevoed door iemand in een rolstoel. Ik heb vaak genoeg meegemaakt hoe vervelend en beperkend de wereld is voor iemand wiens plannen door één drempel kunnen worden doorkruist.

Onverwachte terrassen, steigers, reclameborden: voor wie op wielen rijdt is het regelmatig het einde van de plannen, of stevige vertraging bij een belangrijke afspraak. Dat is constante stress waar mensen die afhankelijk zijn van een rolstoel mee te stellen hebben.

Wie op vakantie wil — of nét een vakantie heeft geboekt — wil zeker weten dat het geen twee weken in een hotelkamer wordt omdat geen van de geplande tripjes effectief toegankelijk bleek.
Vier sporen, alle vier ontwikkeld, getest en in gebruik. Onze software herkent inmiddels drempels op nieuwe foto's zonder dat we ze nog hoeven te annoteren. Wat ontbreekt is niet de techniek — het is de snelheid om een hele stad te doen in plaats van één winkelstraat.
Klassiek veldwerk met eigen intake-tool. Per straat een gestructureerde rondgang volgens een herhaalbaar protocol. 171 winkelingangen in het centrum van Maastricht gemeten.

Van elk object meerdere foto's vanuit diverse hoeken. Wat vanuit één hoek een verkleuring lijkt, blijkt vanuit een ander perspectief een drempel.
Vaste meetblokken van 2, 4 en 8 cm naast bestaande drempels. Daarmee is het model getraind op hoogte-inschatting — geen schatting, een referentie.

Duizenden foto's handmatig geannoteerd, beeldherkenning getraind op deze specifieke beelden. Het model herkent nu drempels op nieuwe foto's zonder dat we ze nog hoeven annoteren.
De methode hierboven werkt — maar één persoon op de fiets meet ongeveer 60 winkelingangen per dag. Een stad als Maastricht bevat duizenden objecten, en die moeten elke zes maanden opnieuw. De crowdfund financiert het stukje techniek dat dat handwerk overneemt: een compact meetwagentje en een snellere computer om de beelden te verwerken.
Let op: wat hieronder staat is een conceptschets. De wagen wordt ontwikkeld als de crowdfund slaagt — niet daarvoor.
Als we dit project uitleggen, krijgen we regelmatig drie type vragen.
Een dakcamera op een auto staat op ongeveer 2,5 meter. Vanaf die hoogte is een stoeprand of drempel van 4 centimeter visueel nauwelijks te onderscheiden van een verkleuring in het wegdek. De invalshoek werkt tegen je: hoe groter de hoek tussen camera en object, hoe slechter de diepte-schatting.
Voor Google is dat geen probleem — hun opdracht is straten indexeren, niet kwalificeren. Geen grote commerciële partij heeft baat bij scannen op stoephoogte. Wij plaatsen de LIDAR-scanner zo dicht mogelijk bij het wegdek: op ongeveer 30 cm.
Geen spannend idee. Wel een ander idee — op een hoogte waar het er werkelijk om gaat.
Hangt af van wat u met "AI" bedoelt. Taalmodellen — Claude, ChatGPT, Gemini — geven de meest waarschijnlijke output, maar nooit met zekerheid. Voor het meten van een stoeprand is "waarschijnlijk" niet goed genoeg.
Getrainde beeldherkenning kán wel met zekerheid werken, maar alleen na grondige training op de juiste data. Stoepranden en winkeldrempels zijn geen vaste set vormen zoals verkeersborden: ze verschillen per straat, per stad, per bouwjaar.
En vóór je iets kunt herkennen moet je weten wát je opslaat. Toegankelijkheid meten is iets anders dan toegankelijkheid vastleggen. Een bankje is een rustpunt, een lantaarnpaal bepaalt of iemand 's avonds nog durft te lopen, een vuilnisbak is een obstakel buiten verwachting. Daarvoor is een ontologie nodig die nog niet bestaat. Wij bouwen er één.
Waarom dat ook de reden is dat grote partijen het laten liggen: de inspanning is te groot voor wat het aan kaartdata-omzet oplevert. Voor ons is het de kern.
Eén objecttype uit ons schema. Vier waarden voor "hoogte" — niet drie, niet zes — gebaseerd op wat we tijdens duizenden metingen daadwerkelijk in de stad tegenkwamen.
Tijdens ons vooronderzoek vonden we mooie initiatieven — toegankelijkheidskaarten, buurtacties, de vrijwilligers rondom het Ronald McDonald-huis in Houthem. Werk dat we diep respecteren. Maar de meeste worstelen met dezelfde twee dingen.
Vrijwilligers-data is onschatbaar als indicatie, maar moeilijk bruikbaar als hard feit. Een drempel wordt door de één in graden genoteerd, door de ander in "lastig", door een derde in centimeters. Voor mensen prima leesbaar. Voor een routeplanner: te veel ruis. Wij vullen die data aan met uniforme metingen, niet vervangen.
Stoepen veranderen. Een terras gaat staan, een paaltje wordt geplaatst, een tegel breekt. Eén scan per stad is niet genoeg — het moet elke zes maanden opnieuw. Daar lopen subsidie-projecten op stuk: na drie jaar is het geld op en is de data verouderd.
We meten meer dan alleen drempels — bankjes, verlichting, breedtes, oneffenheden.
De rijke dataset wordt verkocht aan routeplanners, bezorgers en gemeenten — twaalf maanden exclusief.
Verkoopinkomsten financieren primair de volgende scan. Daarna gaat de data open en gratis voor iedereen.
Geen donateurs-vermoeidheid na jaar drie. Geen subsidie-cliff. Het project verdient zichzelf terug.
Vier soorten werk houden dit project draaiende. Drie daarvan doen we nu met de hand. De crowdfund automatiseert wat geautomatiseerd kán worden — en laat het menselijke deel met rust waar dat hoort.
Waarom foto's? Ze vergeten niet en ze blijven gelijk. Een ideale bron om een model iets te leren.
Handmatig — foto per foto, op de fiets.
Geautomatiseerde intake op een rijdend platform.
Hoogtes, breedtes, hellingsgraden — de harde getallen die een routeplanner nodig heeft.
Met de hand, meetblokjes en notitieblok.
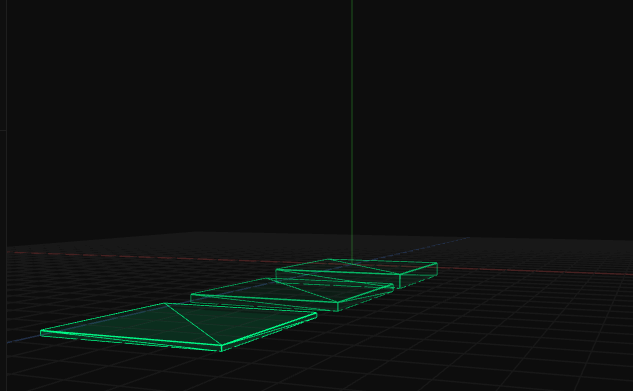
Camera detecteert object → activeert LIDAR-meetbalk → locatie + 3D-scan per obstakel.
Annoteren, nieuwe input testen, randgevallen wegen. Dit is denkwerk, geen rekenwerk.
Handwerk.
Handwerk — bewust. Dit hoort bij mensen te blijven.
Hier wringt het schoentje. We scannen niet één foto per straat, maar tot 20 per meter — vanuit verschillende hoeken, bij wisselend licht.
~3 minuten per foto. De huidige computer mist het werkgeheugen voor de modellen.
Wandel-, jogging- of fietssnelheid door de stad. Geen wachten meer per object.
Dit project bestaat qua kostenposten hoofdzakelijk uit drie componenten: meting, verwerking en continuïteit.
Ten eerste is het slechts tot op zekere hoogte mogelijk om voor deze taak apparatuur te huren of klaar-voor-gebruik te bestellen. Bovendien — zouden we kopiëren wat anderen al gebruiken, dan bouwen we een machine die (óók) nooit voor deze taak bedoeld was. De verwerking daarentegen is wel weer een ordinaire geldkwestie: door het toenemend gebruik van AI-software zijn de kosten van VRAM-kaarten eenvoudigweg geëxplodeerd.
Sensoren combineren, kalibreren, behuizing maken. Hardware levert geen meetkar — het levert losse onderdelen.
De testdata uit Maastricht en Valkenburg moet uitgebreid worden. Duizenden foto's, handmatig geannoteerd.
Maastricht en Valkenburg in zes maanden. Inclusief tweede meetronde om de verandering-over-tijd vast te leggen.
De GIS-laag, de ontologie, de query-tools. Geen hardware, wel onmisbaar.
Onderdelen die breken, transport, inklaring, vertaalwerk. Niet veel — maar het is er.
Hardware tussen €16K en €19K (afhankelijk van dan geldende importheffingen en douane). Daarbovenop circa €5K aan eigen projectkosten — transport, veldwerk, stichting, modeltraining-uren. Plus een buffer voor wat onderweg anders blijkt dan gepland. Slaagt de crowdfund met meer? Dan wordt elke extra euro een halve straat extra. Slaagt hij met minder? Dan schalen we af op verwerkingscapaciteit en aanvaarden we dat het project vertraging oploopt.
Het Mulier Instituut deed onderzoek naar wandeltoegankelijkheid voor mensen met een beperking. Hun bevindingen liggen verrassend dicht bij wat wij in Maastricht zien.
Mulier Instituut — Onbeperkt wandelen (PDF) ↗De data die we verzamelen is waardevol. Routeplanner-apps, bezorgbedrijven en gemeenten hebben er nu al behoefte aan en geen van hen heeft het. Wij gaan het maken — en het verdienmodel zorgt dat het niet stopt.
Bouwkosten, ontwikkeltijd en de eerste scan van Maastricht worden gefinancierd via de crowdfund.
Eerste 12 maanden: data verkopen aan routeplanners (HERE, OsmAnd), bezorgbedrijven en de gemeente zelf.
Na maand 12 wordt de data open. De B2B-opbrengst betaalt de scan van stad 2, 3, 4.
Als blijk van waardering voor jouw bijdrage ontvang je het volgende. Niet als product — als dank.
Voor iedereen die Drempelvrees vooruit wil helpen. Je bijdrage helpt ons om meer drempels, stoepen en obstakels meetbaar te maken.
Eén specifiek gemeten object wordt aan jouw steun gekoppeld. Zo zie je concreet welk stukje van Nederland jij hebt helpen meten.
Een kruispunt is precies de plek waar toegankelijkheid spannend wordt: oversteekplaatsen, stoepranden, hellingen en obstakels komen daar samen.
We scannen en verwerken de relevante toegankelijkheidsdata van een straatsegment: drempels, obstakels, doorgangen, breedtes en andere meetpunten.
Voor mensen, families, stichtingen of lokale ondernemers die een hele buurt toegankelijker zichtbaar willen maken.
Voor organisaties, gemeenten en sponsoren die toegankelijkheid op stadsniveau willen versnellen. Maakt een volledige stadsscan mogelijk.
Laat je e-mailadres achter en we sturen je een bericht zodra de campagne live gaat. Geen spam — één mail, wanneer het zover is.
Door je aan te melden ga je akkoord met het ontvangen van één e-mail bij lancering. Geen verdere mailings zonder toestemming. Gegevens worden niet gedeeld met derden.